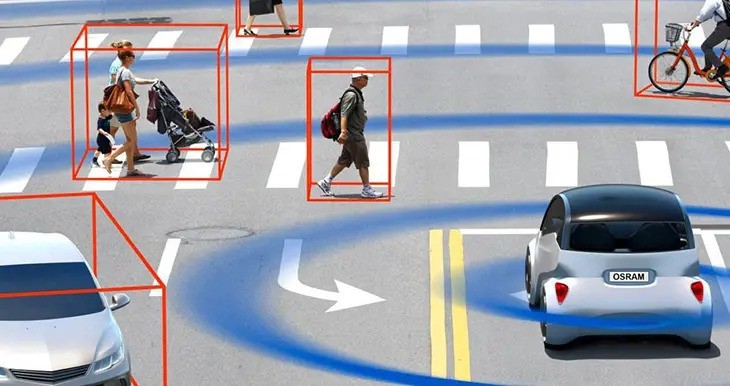
自动驾驶技术中的三个关键层次是环境感知层、决策规划层和控制执行层。在环境感知层中,车辆需要使用相机、激光雷达和毫米波雷达等传感器来获取周围道路环境的信息,并识别交通信号灯、静态和动态障碍物等元素。高精度地图构建则是通过利用驾驶场景中的先验知识,为自动驾驶汽车创建厘米级精度的地图,以帮助它们更安全地行驶并减少对环境感知系统的依赖。
接下来是决策规划层,它包括行为决策、全局规划和轨迹规划三个子系统。行为决策基于场景评估模块参数,及时生成决策指令;全局规划则负责生成参考路径;而轨迹规划子系统则会根据这些指令生成可执行的驾驶轨迹。
最后是控制执行层。该层次负责将决策结果转化为实际行动,并对车辆进行精确控制以实现预定目标。
因此,在整个自动驾驶过程中,各个层次之间相互协作来确保车辆的安全行驶。只有通过不断地优化和改进这些层次的技术,我们才能达到真正可靠的自动驾驶水平。
本文属于原创文章,如若转载,请注明来源:厘米级高精度地图对自动驾驶有多重要?https://auto.zol.com.cn/908/9082754.html