目前,智能驾驶技术主要分为两大流派:一种是以特斯拉为代表的纯视觉方案,另一种则是国内多数汽车厂商所采用的“视觉+激光雷达”融合方案。这两种技术路线之间一直存在着广泛的讨论和分歧。
特斯拉坚持认为,仅依靠摄像头进行视觉处理就足以实现安全、高效的智能驾驶。该公司表示,通过本地端到云端的神经网络架构,结合数十亿条来自真实世界的数据样本对系统进行训练,能够覆盖多种驾驶场景,提升行驶安全性。特斯拉强调,先进的技术并不需要依赖昂贵且复杂的传感器,用视觉技术同样可以实现高水准的自动驾驶能力。
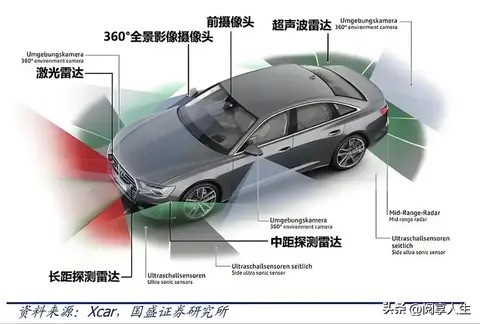
与此同时,国内车企普遍选择在视觉基础上增加激光雷达,以提升环境感知的准确性和稳定性。目前已有部分车型搭载了这一组合方案,用户反馈也呈现出不同的观点。一方面,有人认为激光雷达的实际效果有限,在某些情况下甚至显得多余,尤其是在系统接管驾驶权时,部分用户对安全性仍存疑虑,担心无法及时应对突发状况;另一方面,也有用户对其表现出较高的认可度,认为在疲劳驾驶或长时间行车时,智能辅助系统能有效减轻身体负担,提高出行的舒适性。持乐观态度的人认为,随着技术不断进步,未来的智能驾驶系统将更加可靠,出行方式也将变得更加高效和愉悦。因此,他们更倾向于支持视觉与激光雷达融合的技术路径。
本文属于原创文章,如若转载,请注明来源:智能驾驶技术路线之争https://auto.zol.com.cn/984/9849753.html