智能驾驶最容易让人误判的点,是功能名、责任边界、技术路线被揉在同一张海报里。LCC、NOA、FSD、端到端、无图、VLA,每个词都在讲一部分真相,但它们分属不同层级。把这些词放回各自的位置,你会发现所谓智能驾驶,归根到底就是三件事:谁负责,能做什么,靠什么做。
1 L0到L5讲的是责任归属

行业通行的分级来自SAEJ3016。它关心的核心是动态驾驶任务由谁承担,尤其是谁负责持续监控道路与环境。L2阶段系统可以同时提供转向与加减速的持续辅助,但驾驶员仍要持续监控并随时接管。更高等级才开始由系统承担更多监控责任。
这条底线决定了你看待所有产品名的姿势。名字可以写得很满,责任不会因此转移。特斯拉把产品称为FullSelf-Driving Supervised,并在说明里明确要求主动监督,同时强调车辆并不因此变成自动驾驶。
所以科普智能驾驶,第一步永远不是讲功能,而是先确认它处在L2、L3,还是L4 的语境里。
2 LCC、NOA、泊车,本质是能力组合包

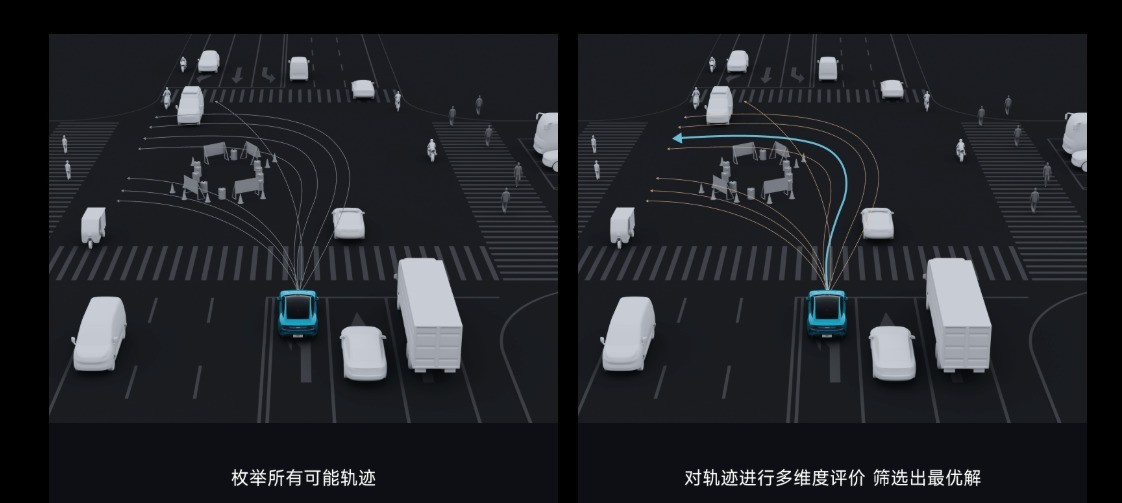
把驾驶任务拆开,功能就会变得很清楚。纵向控制负责跟车与刹停再起步,横向控制负责沿车道线转向,感知负责看见并判断可信度,决策负责变道与路径选择。不同功能名,就是把这些能力按场景打包。

LCC是典型的横向控制能力。它要做的事很朴素,让车在本车道内稳定居中,替你完成长时间的方向盘微调。它的体验好坏,通常体现在弯道跟随是否自然,标线差的时候是否频繁抖动,退出与降级是否可预期。
NOA进入更高一层。它把导航路线叠进来,让系统在一定条件下做车道选择、变道、进出匝道等动作安排。你可以把它理解为把LCC和纵向控制向上再打一个决策包。到这里,系统开始像一个会主动做选择的副驾驶,但只要仍在L2框架内,你仍然要持续监督。
3 同样叫高阶,底层可能完全不同
很多争论表面在比激光雷达和算力,实质在比路线。路线决定了它靠什么能力长出来,也决定了它的风险点在哪里。
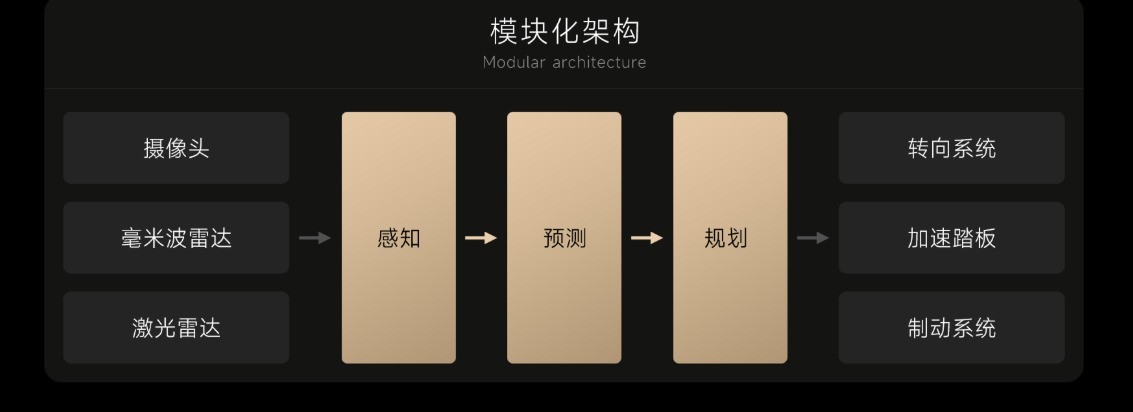
模块化工程栈:可拆、可控、可验证
传统路线更像工程流水线。感知识别目标与车道,预测推演其他交通参与者的意图,规划生成轨迹,控制把轨迹执行到车上。它的优势是边界清晰、便于调参、便于逐模块验证。它的短板也很现实,长尾交互场景里规则写不完,模块之间误差会层层传递,最后让行为显得生硬。
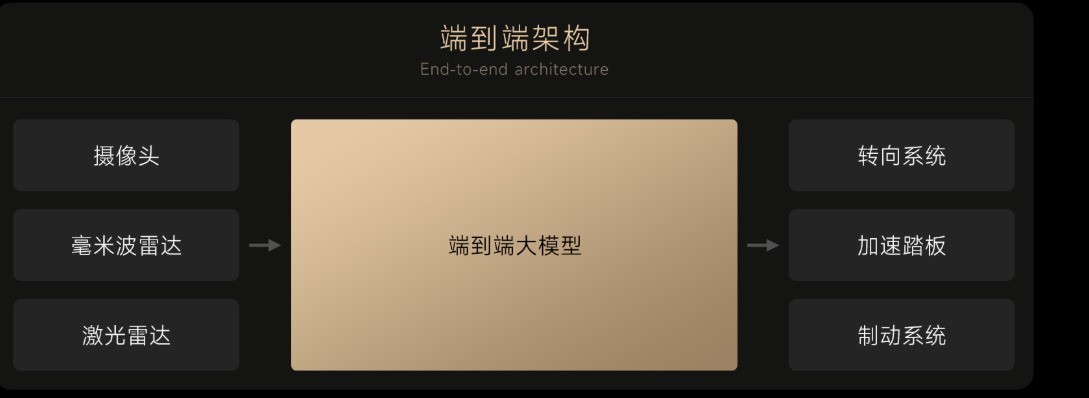
端到端:把更多决策压进模型,用数据覆盖长尾
端到端的核心想法,是让系统从传感器输入更直接地产生轨迹或控制指令,把更多中间环节交给统一模型学习。它追求更强的泛化能力和更自然的交互行为。落地时很少会做成纯端到端,量产系统往往会在外面再套一层硬约束与安全守护,让模型输出必须满足物理可行与安全边界。
端到端带来的变化,是验证逻辑会变。你需要更关心它如何管理置信度,如何降级,如何提示接管,而不是只看它在理想场景里有多顺。
VLA:把视觉理解、语言推理、动作输出连起来的下一波
VLA属于更前沿的模型范式,目标是把视觉理解和推理能力引入驾驶决策,再把结果转成动作输出。它更多在影响未来的上限,尤其是对复杂交互与长尾场景的语义理解能力。对消费者来说,它不等同于一个立刻可点开的功能按钮,更像企业在押注的底层方法论。
4 传感器与地图,是路线之外的两条分支选择
同一套架构可以配不同硬件,同一套硬件也能跑不同架构。硬件与地图的选择,更多是工程权衡。
传感器上常见两种倾向。视觉为主强调统一视觉体系,融合路线强调摄像头、毫米波雷达、激光雷达互补。争论的关键点不在于谁更先进,而在于系统如何在看不清时做出正确的退让。优秀系统会更早暴露不确定性,给出清晰提示并平顺降级,糟糕系统会硬扛到最后一刻再把压力甩给驾驶员。
地图上也有两种倾向。高精地图依赖能让道路结构更稳定,尤其在复杂立交和分岔处行为更确定。无图化追求快速扩展,把更多压力压到车端实时感知与在线决策上。无图不天然更强,它只是更考验车端能力与验证体系。
5 L3 与L4:真正的分水岭在接管与运营
L2 的本质是你在开车,系统帮你减负。L3开始进入条件自动驾驶,系统在限定条件下承担更多驾驶任务,但仍要求有人作为fallback-readyuser,也就是在系统提示时接管的准备者。奔驰在DRIVEPILOT 的说明中明确把它定位为SAEL3,并要求驾驶员在提示时随时接管。
L4走的是另一条路。它追求在限定运行范围内实现无人化运营,典型形态是Robotaxi。Waymo在对外介绍中强调无需驾驶位有人,这种服务背后往往还包含更严格的ODD管控、远程协助与运营体系。
你会发现,越往上走,技术本身不再是全部,运行范围、监管条件、运营体系与事故处置能力都会成为系统能力的一部分。
本文属于原创文章,如若转载,请注明来源:一文看懂辅助驾驶,NOA、LCC、VLA到底是什么?https://auto.zol.com.cn/1132/11327178.html